



ESP32 SMD Oven
IZ5FCY


Chi si marita fa bene, e chi no, fa meglio.

Il PID - Controllore proporzionale-integrale-derivativo
Un controllore proporzionale-integrale-derivativo (regolatore PID o regolatore a tre termini) è un
meccanismo di loop di controllo che impiega il feedback (o retroazione) ampiamente utilizzato
nei sistemi di controllo industriali e in una varietà di altre applicazioni che richiedono un controllo
modulato continuamente.
Un regolatore PID calcola continuamente un valore di errore e(t) come la differenza tra un
setpoint desiderato (SP) e una variabile di processo misurata (PV) e applica una correzione
basata su termini proporzionali, integrali e derivati (indicati con P, I e D), da cui il nome.
I sistemi PID applicano automaticamente una correzione
accurata e reattiva a una funzione di controllo. Un esempio
quotidiano è il cruise control su un'auto, dove la salita di una
collina ridurrebbe la velocità se si applicasse una potenza
costante del motore.
L'algoritmo PID del controller ripristina la velocità misurata alla velocità desiderata con un ritardo
e una sovraelongazione minimi aumentando la potenza del
motore in modo controllato.
La prima analisi teorica e applicazione pratica del PID fu nel campo dei sistemi di governo
automatico per le navi, sviluppati dai primi anni '1920 in poi.
È stato poi utilizzato per il controllo automatico dei processi nell'industria manifatturiera, dove è
stato ampiamente implementato nei controllori pneumatici e poi elettronici.
Oggi il concetto PID è utilizzato universalmente in applicazioni che richiedono un controllo
automatico accurato e ottimizzato.
Operazione fondamentale
La caratteristica distintiva del regolatore PID è la
capacità di utilizzare i tre termini di controllo della
influenza proporzionale, integrale e derivativa
sull'uscita del regolatore per applicare un control-
-lo accurato e ottimale. Il diagramma a blocchi a
destra mostra i principi di come questi termini
vengono generati e applicati. Mostra un regola-
-tore PID, che calcola continuamente un valore
di errore e(t) come la differenza tra un setpoint
desiderato SP=r(t) e una variabile di processo misurata PV=y(t) : e(t)=r(t)-y(t) e applica una
correzione basata su termini proporzionali, integrali e derivati.
Il controllore tenta di ridurre al minimo l'errore nel tempo
regolando una grandezza di controllo u(t), ad esempio l'apertura di una valvola di regolazione,
a un nuovo valore determinato da una somma ponderata dei termini di regolazione
In questo modello:
•
Il termine P è proporzionale al valore corrente dell'errore SP − PV e(t). Esempio, se l'errore è
grande, l'uscita di controllo sarà proporzionalmente grande utilizzando il fattore di guadagno
"Kp". L'utilizzo del solo controllo proporzionale comporterà un errore tra setpoint e il valore di
processo perché il controllore richiede un errore per generare la risposta proporzionale della
uscita. In condizioni di processo stazionarie si raggiunge un equilibrio, con un "offset" SP-PV
stazionario.
•
Il termine I tiene conto dei valori passati dell'errore SP − PV e li integra nel tempo per dare il
termine I. Ad esempio, se c'è un errore SP − PV residuo dopo l'applicazione del controllo
proporzionale, il termine integrale cerca di eliminare l'errore residuo aggiungendo un effetto
di controllo dovuto al valore cumulativo storico dell'errore. Quando l'errore viene eliminato,
il termine integrale cesserà di crescere. Ciò comporterà che l'effetto proporzionale diminuisce
al diminuire dell'errore, ma questo è compensato dall'effetto integrale crescente.
•
Il termine D è una migliore stima dell'andamento futuro dell'errore SP − PV, basato sull’attuale
tasso di variazione. A volte viene chiamato "controllo anticipatorio", in quanto cerca di ridurre
l'effetto dell'errore SP − PV esercitando un'influenza di controllo generata dalla variazione del
tasso di errore. Più rapido è il cambiamento, maggiore è l'effetto di controllo o smorzamento.
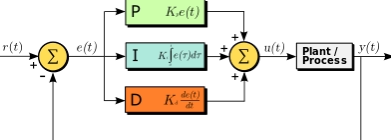
Diagramma a blocchi di un regolatore PID in un anello di
retroazione. r(t) è la variabile di processo (PV) o il setpoint (SP)
desiderato e y(t) è il PV misurato.